
概��
CANは一般����メ����アで���タを��有する可能性のあるLAUのために、費用対効果が高く、効����なネットワーク機��により����航空用途で使用されて����す�� 共有されたシールド������スト��ア・ケーブルを介して通信を行うので、航空機搭載において����量削減��利点があります。さらに、CAN物����プロトコル仕様��エラー回復および�� 保護メカニズ��を提供する��で航空アプリケーションに��������も��になって����す��
Airbus A380やBoeing787などの新しい����航空輸送機��、すでに飛行デ����シス����、エンジン制御����行制御シス����を含むあら����種類��機��のためにCANネットワークを使用して����す�� CANコンポ��ネントと技術������年にわたって自動車産業で使われてきましたが、航空機環����適用するのには追��の仕様が����でした�� 具体的には、航空アプリケーションの要求を満たすのに適したネットワーク全体��メ����ージ配信の優先�����と����を制御する定義が����です�� 航空機レベルでは、シス����・レベルでのプロトコル部����標準化して、シス����とネットワーク・ドメイン間��相互運用性を確保する����があります�� これら��ニ��ズは��1998年に発行されたCANaerospace規���で最初に策定され、航空����で����使用されて����す��
民間航空機��さまざまなサブシス����・ベンダが多数の異なるネ����ワークを使用して����ので、AirbusとBoeingは�� 航空電子工学委員会��CAN����ニカル・ワーキング・グループと協力してARINC 825規���を定義しました�� ARINC 825の目標��、相互運用性を確保し、商業航空セグメントを含むすべてのクラスの航空機に対してCANサブシス����とほか��航空輸送ネ����ワークとの相互運用を簡��化することです�� CAN����ニカル・ワーキング・グループ��、当��Airbus、Boeing、Rockwell Collins、GE Aerospace、Stock Flight Systemsのメンバ��で構��され��2007年11月にARINC 825仕様を発行し�� 2009年12月に補足1を発行しました。現在の最新版����2015年7月発行��ARINC Specification 825-3です��
現在の民間航空機シス����・アーキ����チャはARINC 664、Part7��AFDX��、ネ����ワーキングIMA��統合モジュラーアビオニクス��アーキ����チャに補助サブシス����としてCANを����込んで����す�� これら��航空機��場��CANは動作中に����常は低~中程度の���タ伝����を����とする、センサ、アクチュエータ、およ��そ��他��アビオニクス・����イスをリンクするために使用されて����す�� CANはフライトデ����の����制御をするシス����をサポ��トする大容量ネ����ワークを補完する役割をします�� ����一般����航空シス����・アーキ����チャでは、CANを主要な航空電子ネ����ワークの一つとして、また��航空電子工学のバックボ��ン・ネットワークとして採用して����す�� こ��役割において、CANは飛行安��にとって重要なネットワークのすべての要件を満たす����があります��ARINC 825仕様��、両方の哲学を取り��れたネットワークを構築するためにCANを機��強化して����す�� これは、��ライマリまた��補助����ビオニクス・ネットワークとして使用でき、次の要件を満たすように設計されて����す��
- ローカルCANネットワークとほか��航空機ネ����ワークとの簡単な接��
- 実����ストと変更コスト��最小化
- CAN接続された搭載機器��LRU����最大の相互運用性と互換性
- 構��の柔軟性��他��LRUに過度の影響を与えることなく、バスのノ��ド��追��、削除、変更が容��
- シス����の相互接��
- パラメトリ����・���タ転送とブロ����・���タ転送��両方でシス����とネットワークの����を容易に����るトラフィ����
- エラー検��とエラー検知の統��
- オンボ��ド�����タ・ロードや航空機��健康管����どのシス����・レベル機��を実����ることが可能
CANの基本概念
次の図1-1は、CANを介して通信する一般����シス����を示して����す。送信が����なノ��ド��、バスがアイドル状態になるまで����なければなりません�� ����を送信する����があるノ��ド��、バスがアイドル状態であるか、また��フレー��間��スペ��ス後に����信のために保留中の適����メ����ージ・アイ��������ファイヤを送信します�� バスの調停��、メ����ージ・アイ��������ファイヤの送信中に実行されます。より低い優先�������メ����ージを送信するノ��ド��、最も高い優先�������メ����ージを送信するノ��ドに排他制御を許可します�� 受信ノ��ド��、受信したメ����ージを検証します。フレー��間スペ��スの後、次のメ����ージで調停サイクルが繰り返されます。下図に示すよ����、丸で囲まれたノ��ド��送信中で、他��ノ��ド��受信中です��
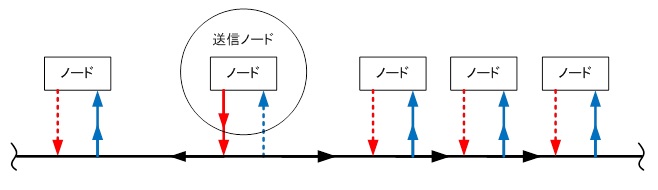
図1-1 CAN通信モ����
CAN の特徴
ARINC 825の����なる、CAN プロトコルは次のような特徴をもって����す��
マルチ��マスタ方��
バスが空��������とき��、バスに接続されるすべてのノ��ドがメ����ージの送信を始めることができます(��ルチ��マスタ���� バスに対して最初に送信を開始したノードが送信権を得ることができま��(CSMA/CR 方��)�� 同時に����のノ��ドが送信を始めた���合��、優先�������高い ID のメ����ージを送信して����ノ��ドが送信権を得ることができます�� そ��結果優先�������高いノ��ド��周期を乱されず����いリアルタイ��性を保つことが可能です��
シス����の柔軟性
ノ��ドにアドレスを設定する����がな����めバスにノ��ドを追��また��削除する場合、バスにつながる他��ノ��ド��ソフトウェア、ハードウェアおよびアプリケーション層に変更を加える����がありません��
調��
CANプロトコルでは、すべてのメ����ージは決まったフォーマットで送信されます。バスが空�������� とき��、バスにつながるすべてのノ��ドが新しいメ����ージの送信を始めることができます�� 2つ以上��ノ��ドが同時にメ����ージの送信を始めた���合��、アイ��������ファイヤによって優先�����が決められます。アイ��������ファイヤはメ����ージの送り先を示すものではなく�� バスにアクセスする際��メ����ージの優先�����を示します��2つ以上��ノ��ドが同時にメ����ージを開始した���合、各メ����ージのアイ��������ファイヤに対してビット単位で調停を行います�� 調停に勝った��1 番高い優先�����をもつと判断された)ノード��そ��まま送信を続け、調停に��けたノ��ド��直ちに送信をやめ受信動作に移ります��
通信速度
ネットワークの規模に合わせて通信速度を設定することができます��1つのネットワーク����は、すべてのノ��ドに対して同一の通信速度を設定しなければなりません�� 通信速度が異なるノードが1つでもつなげられて����と、そのノ��ドがエラーを��し通信を阻害してしま����す��
高信頼性
シールド������スト��ア・ケーブルを使用し、外部からのノイズに強����動信号で外部からのノイズの影響を受けにくくし、データの正当性を保証するCRCなどで、エラーを確実に検��します��
エラーの検����通知��リカバリー機��
すべてのノ��ドがエラーを検��することができます(エラーの検知機������ エラーを検��したノ��ド��、即座に他��すべてのノ��ドに対して一斉にエラーを通知します(エラーの通知機������ メ����ージを送信して����ノ��ドがエラーを検��するとそ��送信を強制����終����てエラーを通知し、その後そのメ����ージが正常に送信されるまで再送信を繰り返します(エラーのリカバリー機������
����の封じ込み
CAN では外部からのノイズなどが原��で一時的にバス上�����タが化けるエラーと、ノード����������、ドライバ������、断線などが原��で継続的にバス上�����タが化けるエラーがあり�� これら��エラーの種類を判別する機��があります。この機��により、エラーを起こし��������ードが他��正常なノ��ド��通信を妨げな��������そ��ノ��ド��通信の優先度を下げたり�� 継続的にバス上�����タが化けて����場合��そ��エラーの原因となって����ノ��ドをバスから����離します��
リモート�����タ要��
"リモート��フレー��"を送信して他��ノ��ドに���タ送信を要求することができます��
ネットワーク・ドメインの説��
航空機��のシス����・アーキ����チャの観点から、イーサネット��ースのネットワークであるARINC 664 および、CANベ��スのシス����バスであるARINC 825として該当する一般����ネットワーク・ドメインがあります�� ARINC 664ネットワークは、IPアドレス・ベ��スのプロトコルとホスト��インターフェイスの通信ポ��ト構��によって特徴づけられます�� ARINC 825ネットワークは、データ消費����処����る������ある����を選択できるようにする、データ・アイ��������ファイヤを使用するCANベ��スのプロトコルによって特徴づけられます��
図1-2は��2つの独立したCANネットワークを備えたネットワーク・シス����の例を示します。各ネットワークには高速ネ����ワークへのゲートウェイがあり、次のようにさまざまな相互通信が利用できます��
- シス����間通信は、同一CANネットワーク���同一シス����の一部を形成するCANノ��ド間の通信として定義されます(例:シス����#1ノ��ド��、CANバス#1で共に通信しま��
- シス����間通信は、同一CANネットワーク���異なるシス����からCANノ��ド間の通信��例:シス����#4ノ��ドから、CANバス#2上��シス����#5ノ��ドへの通信��として定義されま��
- ネットワーク間通信は、異なるネ����ワーク上また��、異なるネ����ワークを経由するシス����間��通信として定義されま��
- CANバス上��ノ��ドを制御する高速ネ����ワーク��例:CANバス#2上��シス����#4ノ��ドと通信する高速ネ����ワーク上��シス����#6��
- 別���CANバス上��CANノ��ド間の通信。高速ネ����ワークは、バス間��ブリ����機��を提供する(例:高速ネ����ワークを介して、CANバス#1上��シス����#3から、CANバス#2上��シス����#3ノ��ド��
- 別���CANバス上��CANノ��ド間の通信。高速ネ����ワークは、バス間��ブリ����機��を提供する(例:高速ネ����ワークを介して、CANバス#1上��シス����#2から、CANバス#2上��シス����#5ノ��ド��
全てのCANメ����ージはブロードキャストされ、他��すべてのノ��ドによって受信されます��
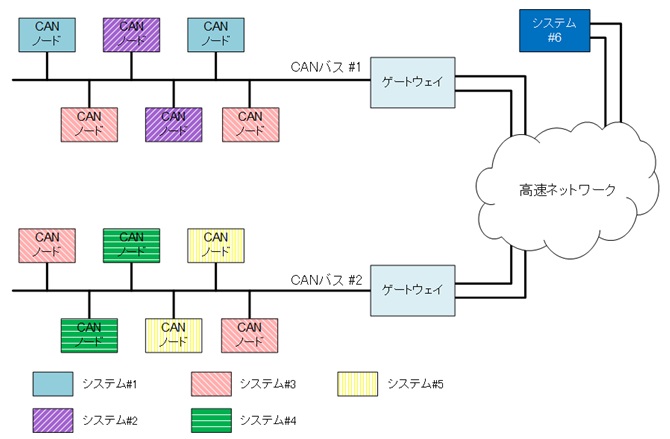
図1-2 2つの独立したCANネットワークを備えたネットワーク・シス����の��
図1-3は����速シス����・ネットワークと統合されたCANの2つの���タ・フローを示して����す�� シス����1のLRU1によって送信されたデータは青色で、バスおよびゲートウェイ上��すべてのLRUによって受信されます�� ゲートウェイは、受信したメ����ージを選択的に高速ネ����ワークに転送します。ゲートウェイによって高速ネ����ワークから受信されたメ����ージは、シス����1と2のCAN接続LRUに転送されます��
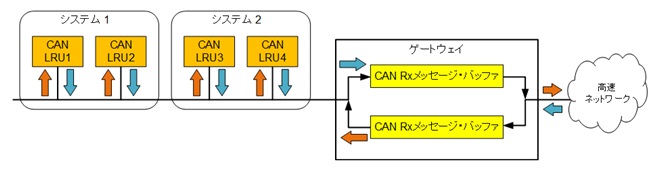
図1-3 ネットワーク・ドメインと���タ・フロー
CAN プロトコル・アーキ����チャ
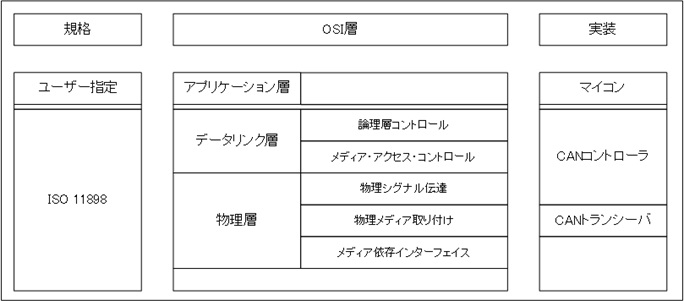
図1-4 CANプロトコル・アーキ����チャ
CANプロトコル��ISO-11898-1����、原����して����、��ファイバ、また��無線ネ����ワークの����れ��媒体でも実����きます�� 光ファイバおよ��無線��、��イントツーポイント接続に限定されて����す。シールド������スト��ア������ARINC 825で扱われる唯一の物����です��CANノ��ド��以下��機��を実����る����があります��
- 電磁的な保護��雷の間接����響、サージ����強度放������HIRF��など��
- コントローラ・プロトコルと物����ス��例:トランシーバ)間のインターフェイス
- ����処��
- 健康管����モニタリング
- ���タ・フローとバス調��