
物����
CANは120Ω����スト��ア・ケーブルを介して相互接続されたノ��ドで構��されて����す。これらのノ��ド��媒体を共有し、CANプロトコルを使用して通信します�� 通常、双方向通信を利用するマルチ��スタ・ネットワークです�� 図2-1に示すよ����異なるサプライヤ、異なるシス����間で相互運用性に����なパフォーマンスを確保するためには�� すべてのノ��ドがCAN ISO 11898 パ����1およびパ����2仕様に準拠して��������があります��
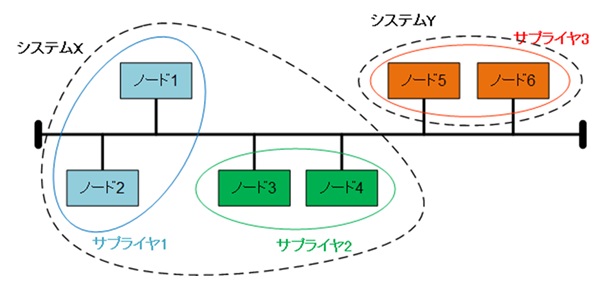
図2-1 マルチシス����・ネットワーク
CAN物����標��
ノ��ド��特性
CAN物����は、信号が媒体上でどのように伝送されるかを定義します。信号はISO 11898-2で次のように扱われます��
- ビット表現と同期
- 送受信信号の電気信号レベルと特性
- 伝送媒体およ��コネクタ
図2-2は、CANノ��ド��例を示します��CAN機��はさまざまな方法で実����きます��CANコントローラは単独で使用することも、��イクロコントローラに����むこともできます�� 特定用途向け集積回路��ASIC����また、すべての機��を含むことができます。これらのコントローラの多くは市販されて����す��
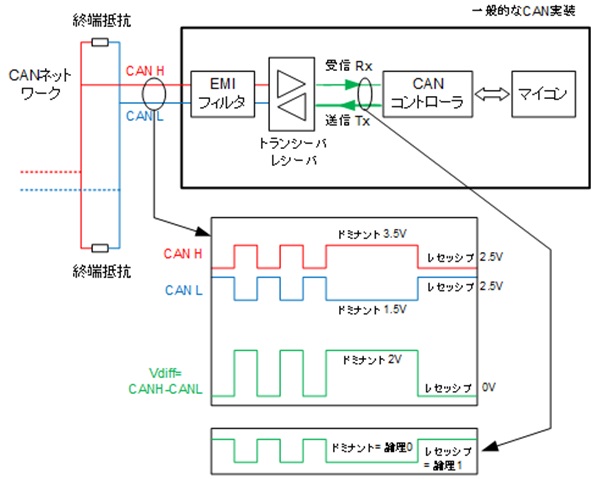
図2-2 ノ��ド��アーキ����チャ��
電磁的な保護要件
����ードには、設計��環����件に適合する電磁的保護��例:落雷の間接����響、サージ、HIRF��High Intensity Radiated Fields����ための回路が����となりますが����磁的保護を行うと静電容量が増加します��
- コモンモード������容量C1とC2の合計��100pFを����ては����な��
- 差動容量で測定した差動容量CDIFFは50pFを����ては����な��
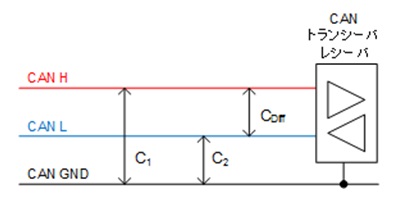
図2-3 差動容��
バス電圧
CAN コントローラは2 本のワイヤの電位差によりそ��バスのレベルを判断します。バスのレベルにはドミナント��レベルとレセ����ブ��レベルがあり、����どちらか一方のレベルをとります�� 送信ノ��ド��こ��バスのレベルを変化させることによって、受信ノ��ドにメ����ージを送信することができます。図2-4にCANのバス電圧レベルを示します��
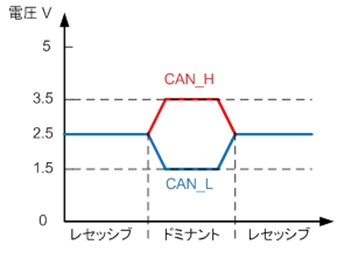
図2-4 バス電圧レベル
CANバス速度 VS. バス長
ARINC 825では、以下��伝����度の一つを使用します��
- 83.333 kbit/s
- 125 kbit/s
- 250 kbit/s
- 500 kbit/s
- 1 Mbps
CANの電気的特性に関して、データレート��図2-5に示すよ����ネットワークの長さ��関数です。より短����ス長の場合��1Mbit/sの最大���タレートを使用することができます�� ±2.5V差動伝送������コモンモード除去と高い電磁妨害��EMI��を保証します��CANネットワーク・セグメントに接続できるノ��ド��数は、CANバス・トランシーバが����できる最小限の��荷抵抗に依存します��
ノイズの多い環����は���タレートが高いと機��しな����スが発生する���合があるため、データレート��できる��け低く選択する����がありますが、最悪の場合��安��マ��ジンを含んだ状態で十��に高くする����があります�� また、伝送ビ����レート��許容誤差は����択された���タレート��±0.15%でなければなりません��
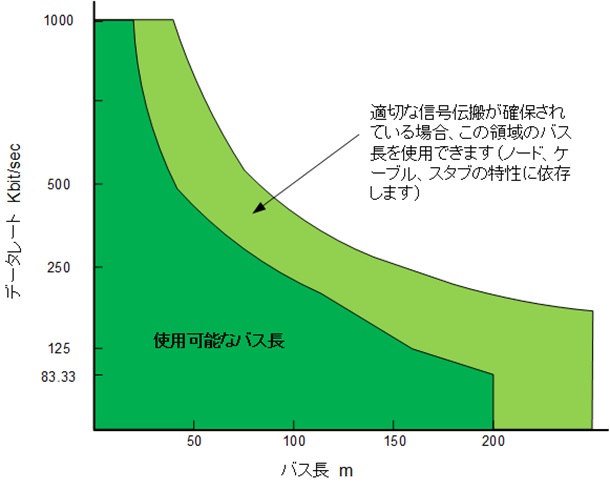
図2-5 バス長と���タレート��関��
ビット��タイミング
ビット��タイミング・パラメータは、CANコントローラ・コンフィグレーション・レジスタに設定されます�� これは、すべてのノ��ド間の相互運用性を保証し、回線およ��ノ��ド������、������間およ��発振器の許容誤差を保証するために定義されて����す��
同期ジャンプ����SJW ��Synchronization Jump Width������1時間量[Tq��とする。サンリング・ポイント��、CANシス����のビット��タイミングの75%��87.5%まで選択する����があります�� 1つのサンリング・ポイント��みが使用されます��ISO 11898-1は、SJW、時間量、サンリング・ポイント��定義を提供して����す��
適����調停��ために、ネ����ワークに接続されたすべてのノ��ド��、同じビ����・タイミング構��を持つ����があります��1つのノ��ドでも����外である時、��体的な機��は保証されません��
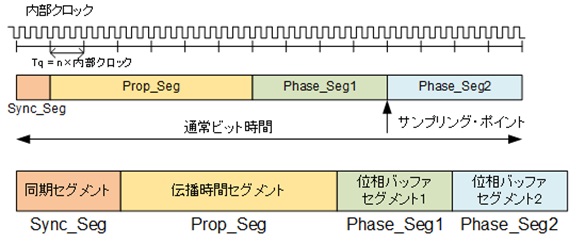
図2-6 ビット��タイミング
以下��ISO規���からの定義です��
- Sync_Seg
- 同期セグメント。これ��さまざまなCANノ��ド��同期に使用されます。このセグメント��にエ����が存在することが予想されます��
- Prop_Seg
- 伝播時間セグメント。これ��、ネ����ワーク���物��������時間を補償するために使用されます��
- Phase-Seg (1 / 2)
- 位相バッファ・セグメント。これらは、発振子��発振誤差を次の再同期までに補償するために使用されます。これらのセグメント��、��同期によって延長また��、短縮される���合があります��
- Sample point
- サンプリング・ポイント。バスレベルが読み取られて解釈される時点��
さらなる定義は上記から導かれます��
- Sample_Seg
- Sample_Seg = Prop_Seg + Phase_Seg1
- ユーザーは、Prop_SegとPhase_Seg1を区別できません��
- IPT��Information Processing Time��
- ����処����間��、ビ����レベルの計算��ためにサンプリング・ポイントから始まるセグメント時間です��
- SJW = Synchronization Jump Width
- 再同期ジャンプ������同期化��結果、Phase_Seg1は長くなりPhase_Seg2はSJWによって与えられる限界まで短縮される��
- Internal delay time
- CANノ��ド��tnodeは、ノード��部処����よって信号に課せられた����です��
- Line propagation delay
- tbus-lineは��2つの最も遠����ー�� 間��配線��電気的特性および長さによって引き起こされる����です。適����調整のために、以下��条件が満たされなければなりません��
- Prop_Seg ≧ 2×tnode + 2×tbus-line
| セグメン�� | 期間(ISO仕��) |
| 同期セグメン�� | 1 Tq |
| 伝播時間セグメン�� | 1��8 Tq |
| 位相バッファセグメン�� 1 | 1��8 Tq |
| 位相バッファセグメン�� 2 | 最大��IPT、位相バッファセグメン��1�� |
| SJW | 1��4 Tq および �� 位相セグメン�� |
| ビッ�� レー�� (kbit/s) |
TBIT (μs) |
Tq(ns) | Tq/ bit数 |
Prop_Seg + Phase_Seg1 (Tq) |
Phase_ Seg2 (Tq) |
SJW (Tq) |
MAXIPT (ns) |
発振器精度 |
| 83.333 | 12 | 750 | 16 | 11 | 4 | 1 | 1500 | 100 ppm |
| 125 | 8 | 500 | 16 | 11 | 4 | 1 | 1000 | 100 ppm |
| 250 | 4 | 250 | 16 | 11 | 4 | 1 | 400 | 100 ppm |
| 500 | 2 | 125 | 16 | 11 | 4 | 1 | 200 | 100 ppm |
| 1000 | 1 | 125 | 8 | 5 | 2 | 1 | 150 | 100 ppm |
設計�����事���
CAN物����の干渉に対する高い耐性はCAN_Hおよび、CAN_Lの対称性によって保障されて����す。トランシーバ������い耐性を保証する主要な要��で、さらに����機器レイアウト(ルー����ング��も重要です�� トランシーバへの配線��PCB上��配線)をできる��け平行に保つように設計する����があります。コネクタピンは図2-7、図2-8に示すよ����相互に近接して����干渉信号と環����ら��離して����ければなりません��
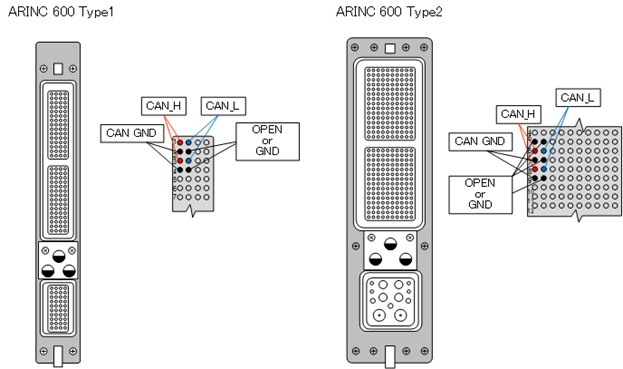
図2-7 ARINC 600コネクタ・ピンアサイン��
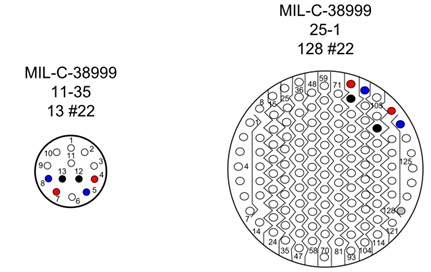
図2-8 丸型コネクタ・ピンアサイン��
航空機へのCANの設置は簡単で����で、他��ネットワークとは区別されます。ディジチェーン接続やバンドル・スプライスなどのさまざまなバス相互接続方法が可能です(図2-9���� CANはシールド付きまた��、シールドなし��ケーブル、およ��手ごろな価格のD-Subタイプを含む様����コネクタで使用できます��
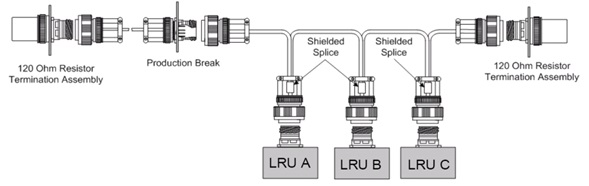
図2-9 接続方��
ケーブル特性
ケーブル特性は、ISO 11989-2��インピ��ダンス����さに関連する抵抗、ライン������に従う����があります�� ケーブルは、設置環����すなわち��圧また��������圧の使用環����応じて選択します。最低限、シールド������スト��アを使用する����があります��
コネクタ��コンタクト特性
CANに特別なタイプ��コネクタ����ンタクト������ありません��2つの信号��CAN_HとCAN_L����ための少なくと��2ピンのコネクタが����です�� 診断プラグを��線に追��して、下図2-10の標準��D-Sub9コネクタを使用してCANのトラブルシュー����ングと保守を容易にすることができます��
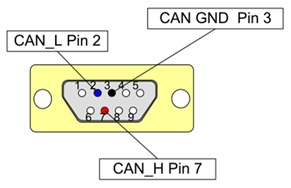
図2-10 D-Sub9コネクタ
設置
CANワイヤのシールド��、シャーシ・グランドに接続する����があります��
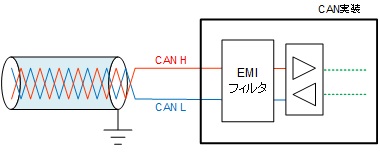
図2-11 グランド接��
ARINC 825の設置は、図2-12に示すよ����リニア・ト��ロジを利用します。スター・ト��ロジーは望ましくな��������をもたらす可能性があるため推奨されて����せん��
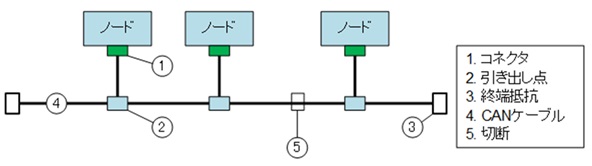
図2-12 リニア・ト��ロジ
インピ��ダンス調整と反����を避けるために��120Ωの終端抵抗をネットワークの両端に取り付ける����があります。終端抵抗��公差はISO 11898-2��±10����に記載されて����す��